import 'dart:async';
import 'dart:io';
import 'dart:math';
import 'dart:typed_data';
import 'package:flutter/material.dart';
import 'package:flutter_localizations/flutter_localizations.dart';
import 'package:libserialport/libserialport.dart';
/*
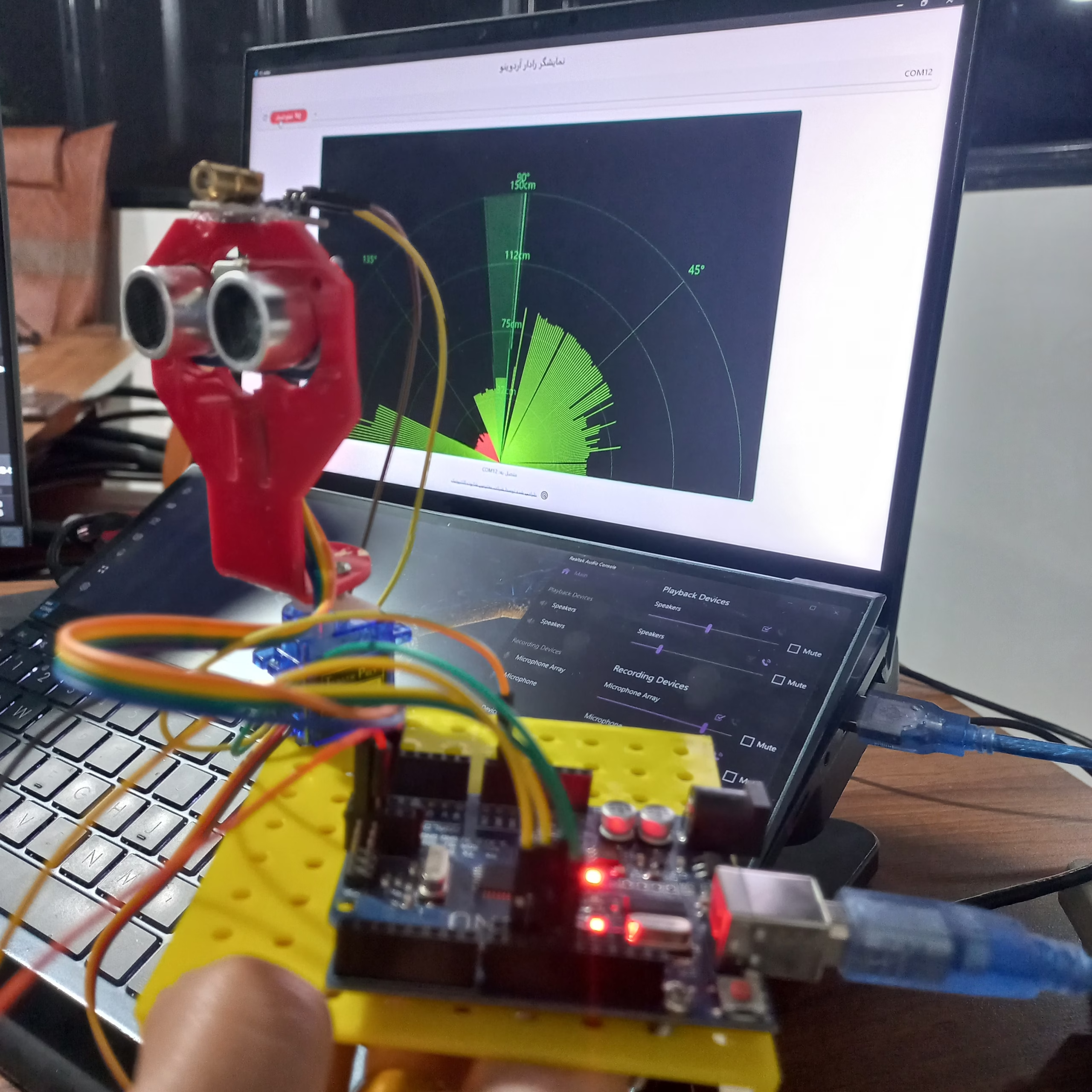
اپلیکیشن نمایشگر رادار آردوینو
نویسنده: مهدی بهرام
شرکت: مخترعین شاتوت الکترونیک
وبسایت: shahtut.com
*/
// یک کلاس برای نگهداری اطلاعات هر نقطه شناسایی شده به همراه زمان آن
class RadarPoint {
final double angle;
final double distance;
final int timestamp; // زمان ثبت به میلیثانیه
RadarPoint({required this.angle, required this.distance, required this.timestamp});
}
void main() {
runApp(const RadarApp());
}
class RadarApp extends StatelessWidget {
const RadarApp({super.key});
@override
Widget build(BuildContext context) {
return MaterialApp(
title: 'رادار آردوینو',
debugShowCheckedModeBanner: false,
// --- پیکربندی برای زبان فارسی و چیدمان راست-به-چپ ---
locale: const Locale('fa', 'IR'),
supportedLocales: const [
Locale('fa', 'IR'),
Locale('en', 'US'),
],
localizationsDelegates: const [
GlobalMaterialLocalizations.delegate,
GlobalWidgetsLocalizations.delegate,
GlobalCupertinoLocalizations.delegate,
],
theme: ThemeData(
primarySwatch: Colors.teal,
fontFamily: 'Vazir', // اطمینان حاصل کنید که فونت فارسی مانند 'وزیر' به پروژه اضافه شده باشد
),
home: const Directionality(
textDirection: TextDirection.rtl,
child: RadarHomePage(),
),
);
}
}
class RadarHomePage extends StatefulWidget {
const RadarHomePage({super.key});
@override
State<RadarHomePage> createState() => _RadarHomePageState();
}
class _RadarHomePageState extends State<RadarHomePage> {
List<String> _availablePorts = [];
String? _selectedPort;
SerialPort? _serialPort;
StreamSubscription<Uint8List>? _subscription;
bool _isConnected = false;
final List<RadarPoint> _radarPoints = []; // استفاده از کلاس جدید برای نقاط
double _currentAngle = 0;
final int _maxDistance = 300; // سانتیمتر، باید با کد آردوینو یکسان باشد
bool _isObjectClose = false; // برای نمایش هشدار نزدیکی شیء
@override
void initState() {
super.initState();
_getAvailablePorts();
}
@override
void dispose() {
_disconnect();
super.dispose();
}
void _getAvailablePorts() {
setState(() {
_availablePorts = SerialPort.availablePorts;
});
if (_availablePorts.isNotEmpty) {
setState(() {
_selectedPort = _availablePorts.first;
});
}
}
Future<void> _connect() async {
if (_selectedPort == null) return;
try {
_serialPort = SerialPort(_selectedPort!);
if (!_serialPort!.openReadWrite()) {
throw SerialPortError("باز کردن پورت ${_serialPort?.name} با شکست مواجه شد");
}
final config = SerialPortConfig()
..baudRate = 9600
..bits = 8
..parity = SerialPortParity.none
..stopBits = 1;
_serialPort!.config = config;
setState(() {
_isConnected = true;
});
_listenToData();
} catch (e) {
_showErrorDialog('خطا در اتصال', e.toString());
if (_serialPort?.isOpen ?? false) {
_serialPort!.close();
}
setState(() {
_isConnected = false;
});
}
}
void _listenToData() {
final reader = SerialPortReader(_serialPort!);
StringBuffer buffer = StringBuffer();
_subscription = reader.stream.listen((data) {
String text = String.fromCharCodes(data);
buffer.write(text);
String bufferString = buffer.toString();
while (bufferString.contains('\n')) {
int newlineIndex = bufferString.indexOf('\n');
String line = bufferString.substring(0, newlineIndex).trim();
bufferString = bufferString.substring(newlineIndex + 1);
if (line.isNotEmpty) {
_parseData(line);
}
}
buffer = StringBuffer(bufferString);
}, onError: (error) {
_showErrorDialog('خطای پورت سریال', error.toString());
_disconnect();
}, onDone: () {
_disconnect();
});
}
void _parseData(String data) {
final parts = data.split(',');
if (parts.length == 2) {
try {
final angle = double.tryParse(parts[0]);
final distance = double.tryParse(parts[1]);
if (angle != null && distance != null) {
final now = DateTime.now().millisecondsSinceEpoch;
setState(() {
_currentAngle = angle;
_radarPoints.add(RadarPoint(angle: angle, distance: distance, timestamp: now));
_isObjectClose = distance < 30; // وضعیت هشدار را بر اساس آخرین فاصله بهروزرسانی کن
// نقاط قدیمیتر از 5 ثانیه را حذف کن تا افکت محو شدن ایجاد شود
_radarPoints.removeWhere((p) => now - p.timestamp > 5000);
});
}
} catch (e) {
// خطاهای parse را نادیده بگیر
}
}
}
void _disconnect() {
_subscription?.cancel();
_subscription = null;
if (_serialPort?.isOpen ?? false) {
_serialPort!.close();
_serialPort!.dispose();
}
_serialPort = null;
setState(() {
_isConnected = false;
_radarPoints.clear();
_currentAngle = 0;
_isObjectClose = false;
});
}
void _showErrorDialog(String title, String content) {
showDialog(
context: context,
builder: (context) => AlertDialog(
title: Text(title),
content: Text(content),
actions: [
TextButton(
child: const Text('باشه'),
onPressed: () => Navigator.of(context).pop(),
),
],
),
);
}
@override
Widget build(BuildContext context) {
return Scaffold(
appBar: AppBar(
title: const Text('نمایشگر رادار آردوینو'),
centerTitle: true,
),
body: Padding(
padding: const EdgeInsets.all(16.0),
child: Column(
children: [
_buildControlPanel(),
const SizedBox(height: 20),
// ویجت هشدار برای نزدیکی شیء
if (_isObjectClose)
Container(
width: double.infinity,
padding: const EdgeInsets.all(8.0),
color: Colors.red.shade700,
child: const Text(
'!!! خطر: شیء در فاصله کمتر از ۳۰ سانتیمتر',
textAlign: TextAlign.center,
style: TextStyle(color: Colors.white, fontWeight: FontWeight.bold),
),
),
if (_isObjectClose) const SizedBox(height: 10),
Expanded(
child: AspectRatio(
aspectRatio: 1.7, // حفظ نسبت ابعاد ثابت برای رادار
child: Container(
decoration: BoxDecoration(
color: Colors.black,
borderRadius: BorderRadius.circular(8),
border: Border.all(color: Colors.teal.shade200, width: 2),
),
child: ClipRRect(
borderRadius: BorderRadius.circular(6),
child: CustomPaint(
painter: RadarPainter(points: _radarPoints, currentAngle: _currentAngle, maxDistance: _maxDistance),
size: Size.infinite,
),
),
),
),
),
const SizedBox(height: 10),
Text(
_isConnected
? 'متصل به: $_selectedPort'
: 'قطع شده. لطفا یک پورت را انتخاب و متصل شوید.',
style: TextStyle(color: _isConnected ? Colors.green : Colors.red),
),
const SizedBox(height: 10),
// فوتر با لوگو و متن شرکت
Row(
mainAxisAlignment: MainAxisAlignment.center,
children: [
Icon(Icons.radar, color: Colors.grey.shade600, size: 24), // جایگاه لوگو
const SizedBox(width: 10),
Text(
'طراحی شده توسط شرکت مخترعین شاتوت الکترونیک',
style: TextStyle(fontSize: 12, color: Colors.grey.shade600),
),
],
),
],
),
),
);
}
Widget _buildControlPanel() {
// استفاده از LayoutBuilder برای ساخت پنل کنترل واکنشگرا
return LayoutBuilder(
builder: (context, constraints) {
bool isWide = constraints.maxWidth > 450;
List<Widget> children = [
Expanded(
child: DropdownButton<String>(
value: _selectedPort,
isExpanded: true,
hint: const Text('انتخاب پورت'),
items: _availablePorts.map((String value) {
return DropdownMenuItem<String>(
value: value,
child: Text(value, overflow: TextOverflow.ellipsis),
);
}).toList(),
onChanged: _isConnected ? null : (newValue) {
setState(() {
_selectedPort = newValue;
});
},
),
),
if (isWide) const SizedBox(width: 20),
Row(
mainAxisAlignment: isWide ? MainAxisAlignment.end : MainAxisAlignment.spaceAround,
children: [
ElevatedButton.icon(
onPressed: _isConnected ? _disconnect : _connect,
icon: Icon(_isConnected ? Icons.link_off : Icons.link),
label: Text(_isConnected ? 'قطع اتصال' : 'اتصال'),
style: ElevatedButton.styleFrom(
backgroundColor: _isConnected ? Colors.redAccent : Colors.teal,
foregroundColor: Colors.white,
padding: const EdgeInsets.symmetric(horizontal: 24, vertical: 12),
),
),
IconButton(
icon: const Icon(Icons.refresh),
onPressed: _isConnected ? null : _getAvailablePorts,
tooltip: 'بارگذاری مجدد لیست پورتها',
),
],
)
];
return Card(
child: Padding(
padding: const EdgeInsets.symmetric(horizontal: 16.0, vertical: 8.0),
child: isWide
? Row(mainAxisAlignment: MainAxisAlignment.spaceBetween, children: children)
: Column(children: children),
),
);
},
);
}
}
// --- نقاش سفارشی برای صفحه رادار ---
class RadarPainter extends CustomPainter {
final List<RadarPoint> points;
final double currentAngle;
final int maxDistance;
RadarPainter({required this.points, required this.currentAngle, required this.maxDistance});
@override
void paint(Canvas canvas, Size size) {
final center = Offset(size.width / 2, size.height);
final radius = min(size.width / 2, size.height) * 0.95; // ایجاد یک حاشیه کوچک
// --- پسزمینه ---
final backgroundPaint = Paint()..color = Colors.black;
canvas.drawRect(Rect.fromLTWH(0, 0, size.width, size.height), backgroundPaint);
final backgroundGridPaint = Paint()
..color = Colors.green.withOpacity(0.05)
..style = PaintingStyle.stroke;
for (var i = 1; i <= 20; i++) {
canvas.drawLine(Offset(i * size.width / 20, 0), Offset(i * size.width / 20, size.height), backgroundGridPaint);
canvas.drawLine(Offset(0, i * size.height / 20), Offset(size.width, i * size.height / 20), backgroundGridPaint);
}
// --- خطوط شبکه و برچسبها ---
final gridPaint = Paint()
..color = Colors.green.withOpacity(0.5)
..style = PaintingStyle.stroke
..strokeWidth = 1.0;
final thinGridPaint = Paint()
..color = Colors.green.withOpacity(0.3)
..style = PaintingStyle.stroke
..strokeWidth = 0.5;
for (int i = 1; i <= 4; i++) {
canvas.drawArc(
Rect.fromCircle(center: center, radius: radius * i / 4),
pi, pi, false, gridPaint);
}
final double fontSize = max(8, radius * 0.04);
final textPainter = TextPainter(
textAlign: TextAlign.center,
textDirection: TextDirection.ltr,
);
final textStyle = TextStyle(color: Colors.green.withOpacity(0.8), fontSize: fontSize);
for (int i = 1; i <= 4; i++) {
final distance = (maxDistance / 4 * i).toInt();
final textSpan = TextSpan(text: '${distance}cm', style: textStyle);
textPainter.text = textSpan;
textPainter.layout();
textPainter.paint(canvas, Offset(center.dx - textPainter.width / 2, center.dy - (radius * i / 4) - (fontSize * 1.5)));
}
for (int i = 0; i <= 180; i += 15) {
final angleRad = i * pi / 180.0;
final isMajorLine = i % 45 == 0;
final endPoint = Offset(
center.dx - radius * cos(angleRad),
center.dy - radius * sin(angleRad)
);
canvas.drawLine(center, endPoint, isMajorLine ? gridPaint : thinGridPaint);
if (isMajorLine) {
final labelRadius = radius + (fontSize * 1.5);
final textSpan = TextSpan(text: '$i°', style: textStyle);
textPainter.text = textSpan;
textPainter.layout();
final labelOffset = Offset(
center.dx - labelRadius * cos(angleRad) - textPainter.width/2,
center.dy - labelRadius * sin(angleRad) - textPainter.height/2
);
textPainter.paint(canvas, labelOffset);
}
}
// --- نقاط و آرکهای شناسایی شده با افکت محو شدن ---
final int now = DateTime.now().millisecondsSinceEpoch;
const double fadeDuration = 4000; // 4 ثانیه برای محو شدن کامل
final double sensorAngleRad = 30 * (pi / 180.0);
for (final point in points) {
final double age = (now - point.timestamp).toDouble();
if (age < fadeDuration) {
// شفافیت از 1.0 به 0.0 در طول زمان محو شدن کاهش مییابد
final double opacity = 1.0 - (age / fadeDuration);
final angleRad = point.angle * (pi / 180.0);
final distance = (point.distance / maxDistance) * radius;
if (distance < radius) {
// رنگها با شفافیت محاسبه شده اعمال میشوند
final detectionArcPaint = Paint()
..color = Colors.lightGreenAccent.withOpacity(0.2 * opacity)
..style = PaintingStyle.fill;
final pointPaint = Paint()..color = Colors.lightGreenAccent.withOpacity(opacity);
canvas.drawArc(
Rect.fromCircle(center: center, radius: distance),
pi - angleRad - (sensorAngleRad / 2),
sensorAngleRad,
true,
detectionArcPaint
);
final pointOffset = Offset(
center.dx - distance * cos(angleRad),
center.dy - distance * sin(angleRad)
);
canvas.drawCircle(pointOffset, 2.0, pointPaint);
}
}
}
// --- خط رادار (روی همه چیز کشیده میشود) ---
final sweepAngleRad = (currentAngle) * (pi / 180.0);
final sweepPaint = Paint()
..color = Colors.green
..strokeWidth = 2.0;
// --- مخروط دنباله خط رادار (اصلاح شده) ---
final coneAngle = 45 * (pi / 180);
final gradient = SweepGradient(
center: const Alignment(0.0, 1.0),
colors: [Colors.green.withOpacity(0.5), Colors.green.withOpacity(0.0)], // از پررنگ به شفاف
stops: const [0.0, 1.0],
startAngle: (180 * pi / 180) - sweepAngleRad - coneAngle, // شروع از پشت خط
endAngle: (180 * pi / 180) - sweepAngleRad, // پایان در محل خط
transform: const GradientRotation(-pi),
);
final gradientPaint = Paint()..shader = gradient.createShader(Rect.fromCircle(center: center, radius: radius));
canvas.drawArc(Rect.fromCircle(center: center, radius: radius), (pi) - sweepAngleRad - coneAngle, coneAngle, true, gradientPaint);
// خط اصلی رادار در بالای گرادیان کشیده میشود
final sweepEnd = Offset(
center.dx - radius * cos(sweepAngleRad),
center.dy - radius * sin(sweepAngleRad)
);
canvas.drawLine(center, sweepEnd, sweepPaint);
}
@override
bool shouldRepaint(covariant CustomPainter oldDelegate) {
return true; // همیشه دوباره نقاشی کن
}
}