آموزش ها
پهپاد هوشمند دنبالگر من با دوربین (بر پایه MultiWii 32kB Flight Conroller)

پهپاد هوشمند دنبالگر من با دوربین (بر پایه MultiWii 32kB Flight Conroller):

اقلام مورد نیاز:
MultiWii 32kB Flight Conroller
ماژول GPS/GPRS/GSM SIM808 به همراه بورد راه انداز
ماژول بلوتوث سریال HC-06 همراه با برد کمکی
ماژول بلوتوث سریال HC-05 همراه با برد کمکی
ماژول فاصله سنج التراسونیک ultrasonic SRF05
ماژول فاصله سنج التراسونیک ultrasonic SRF04
موتور براشلس a42212/5t 3500KV متفرقه
پک اقلام مورد نیاز:
در مورد این پروژه پهپاد هوشمند دنبالگر من با دوربین (بر پایه MultiWii 32kB Flight Conroller):
پهباد هوشمند این روزها اسباب بازی ها و ابزارهای بسیار محبوبی هستند. شما می توانید پهپادها و وسایل پرنده حرفه ای و حتی مبتدی را در بازار پیدا کنید. سازنده این پهباد چهار پهپاد دارد (کوادکوپتر و هگزکوپتر)، چون عاشق همه چیزهایی هست که پرواز می کنند، اما پرواز 200 چندان برایش جالب نبود و شروع به کسل کننده شدن برایش می کند، بنابراین تصمیم گرفت که پهپاد خودش را با چند ویژگی اضافی بسازد. او دوست دارد آردوینو را برنامه نویسی کند و مدارها و ابزارها را خودش طراحی کند، بنابراین شروع به ساخت این پهباد هوشمند کرد. از کنترلر پرواز MultiWii استفاده شده است که مبتنی بر تراشه ATMega328 است که در Arduino UNO نیز استفاده می شود، بنابراین برنامه نویسی بسیار ساده بود. این پهپاد را می توان به یک تلفن هوشمند اندرویدی متصل کرد که داده های GPS خود را به پهپاد ارسال کند، و آن را با سیگنال GPS خود مقایسه می کند، سپس شروع به دنبال کردن تلفن می کند، بنابراین اگر در خیابان حرکت کنیم پهپاد ما را دنبال می کند. البته هنوز ایرادات زیادی دارد، زیرا او نتوانسته یک پهپاد فیلمبرداری حرفه ای بسازد، اما تلفن را دنبال می کند، فیلم می گیرد و همچنین دارای سنسور فاصله اولتراسونیک برای جلوگیری از موانع موجود در هوا هست. که این تقریباً ویژگی های یک پهپاد خانگی است. در اسرع وقت یک ویدیو در مورد یک پرواز بارگذاری خواهیم کرد، اما ثبت رکوردهای با کیفیت خوب با یک پهپاد در حال حرکت همیشه دشوار است.
مرحله 1: ویژگی های اصلی
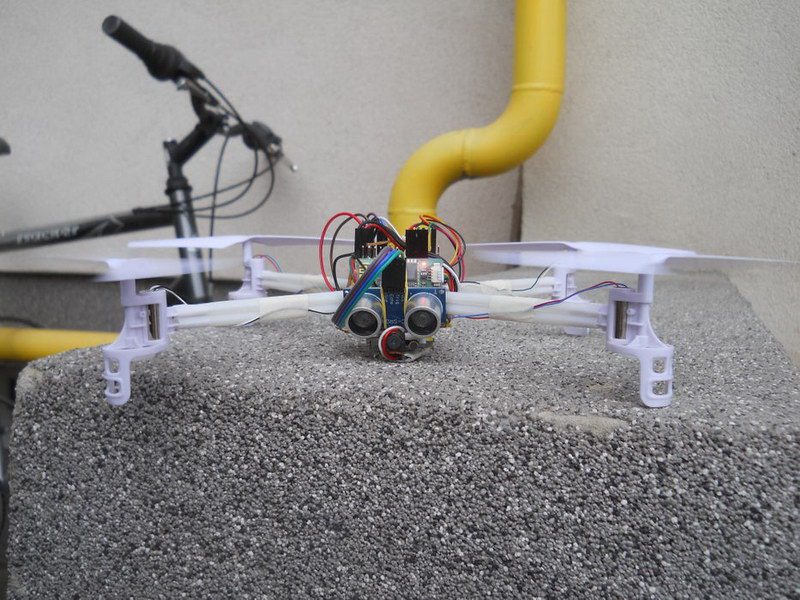
پهپاد تقریباً کاملاً خودکار است، لازم نیست آن را کنترل کنید، زیرا تلفن شما را که معمولاً در دوچرخه شما است دنبال می کند، سنسور اولتراسونیک به دور زدن درختان، ساختمان ها و سایر موانع کمک می کند و GPS اطلاعات موقعیت بسیار دقیقی را ارائه می دهد. بیایید ببینیم در کل چه چیزی داریم:
- باتری 1000 میلی آمپر ساعتی، برای 16-18 دقیقه پرواز مداوم کافی است.
- سنسور اولتراسونیک برای جلوگیری از موانع موجود در هوا
- ماژول بلوتوث برای دریافت اطلاعات از گوشی
- میکروکنترلر مبتنی بر آردوینو
- ژیروسکوپ داخلی
- حداکثر ارتفاع تنظیم شده (5 متر)
- وقتی باتری کم است به طور خودکار روی تلفن فرود می آید (امیدواریم در دستان شما)
- هزینه ساخت آن حدود 100 دلار است.
- می توان برای هر چیزی برنامه ریزی کرد.
- با کمک GPS می توانید پهپاد را به هر مختصاتی بفرستید.
- طراحی کوادکوپتر
- مجهز به دوربین فیلمبرداری 2 مگاپیکسلی 720p HQ
- وزن 109 گرم (3.84 اونس)
بنابراین این تنها کاری است که نسخه اول می تواند انجام دهد، البته او می خواهد پهباد هوشمند را توسعه دهد. در طول تابستان می خواهد پهپاد بزرگترش را با این نرم افزار هک کند.
مرحله 2: فیلم تست پرواز پهپاد هوشمند دنبالگر من با دوربین (بر پایه MultiWii 32kB Flight Conroller)
فیلم
سازنده از دو دوست خوبش خواسته بود که در حالی که زیر پهپاد بود جلوی پهپاد راه بروند تا در صورت افتادن آن را نجات دهند. اما آزمایش موفقیت آمیز بود و همانطور که می بینید پهپاد هنوز خیلی پایدار نیست، اما کار می کند. مرد چپ با یک تی شرت زرد گوشی را در دست داشت که داده های GPS را مخابره می کرد. کیفیت فیلمبرداری با این دوربین بهترین نیست، اما او دوربین های 1080p با وزن کم را پیدا نکرده بود.
مرحله 3: جمع آوری قطعات و ابزار




برای این پروژه به قطعات جدید و غیرعادی نیاز دارید. من از قطعات کم وزن و بازیافتی برای کاهش هزینه طراحی کردم و موفق شدم مواد بسیار خوبی برای قاب به دست بیاورم. اما بیایید ببینیم به چه چیزی نیاز داریم! من مارک Crius فلایت کنترلر را از Amazon.com خریدم و کار کردم.
ابزار:
قطعات:
مرحله 4: پروانه ها را مونتاژ کنید.
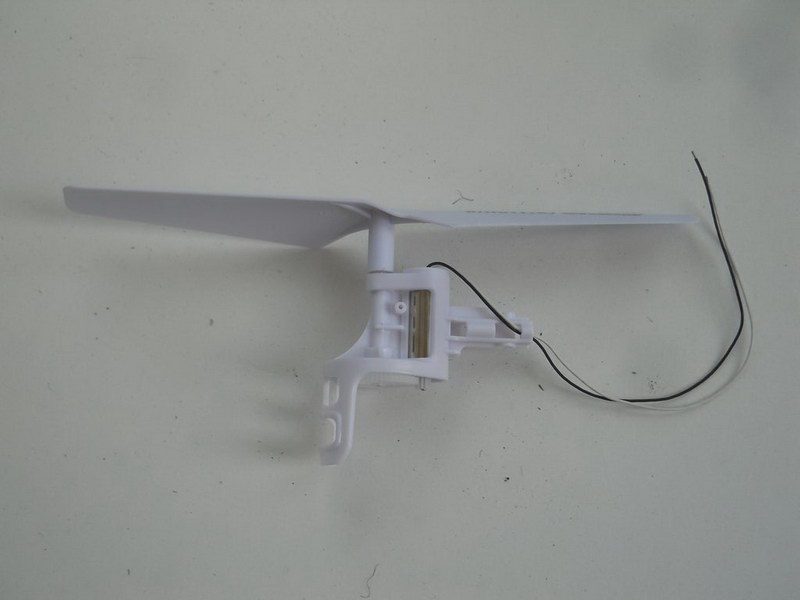

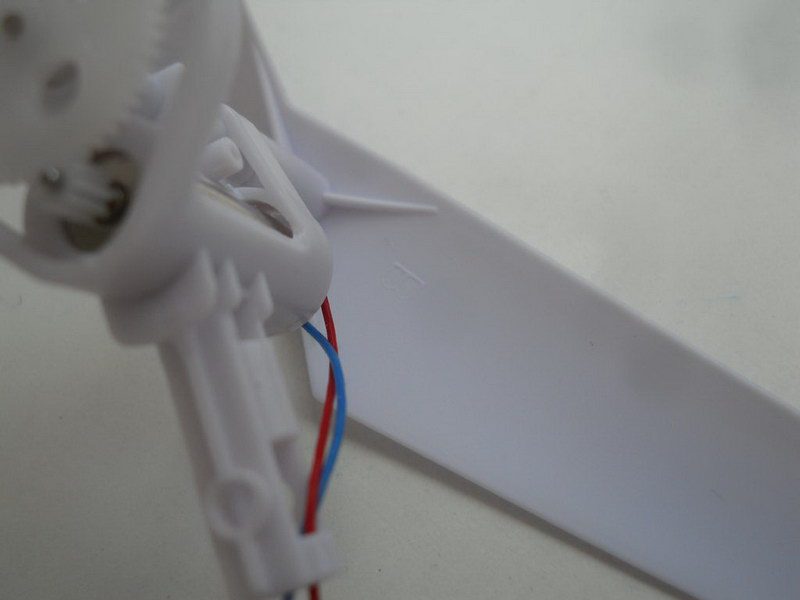

من این ملخ ها با موتور را از Amazon.com به قیمت 18 دلار خریدم، آنها قطعات یدکی پهپاد Syma S5X هستند، اما مفید به نظر می رسیدند، بنابراین آنها را سفارش دادم و خوب کار کردند. فقط باید موتور را در سوراخ آن قرار دهید و پایه ها را به چرخ دنده وصل کنید.
مرحله 5: طرح واره مدار
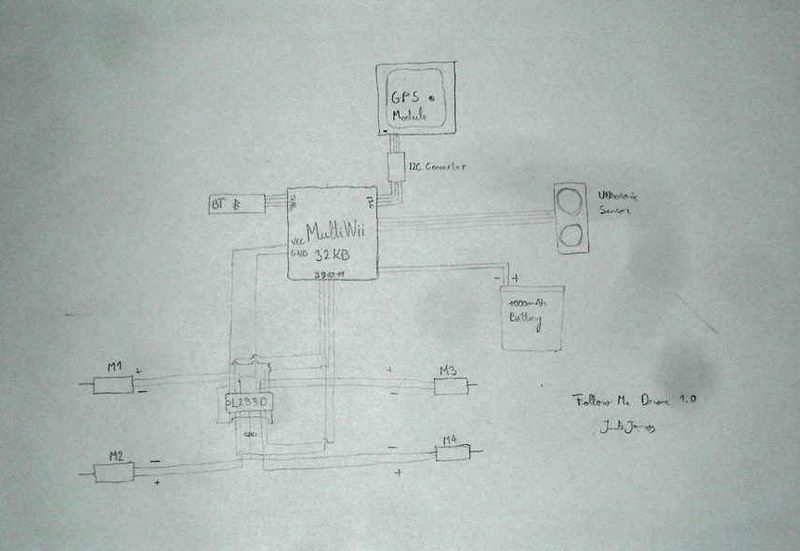
در حین کار همیشه به طرحواره نگاه کنید و مراقب اتصالات باشید.
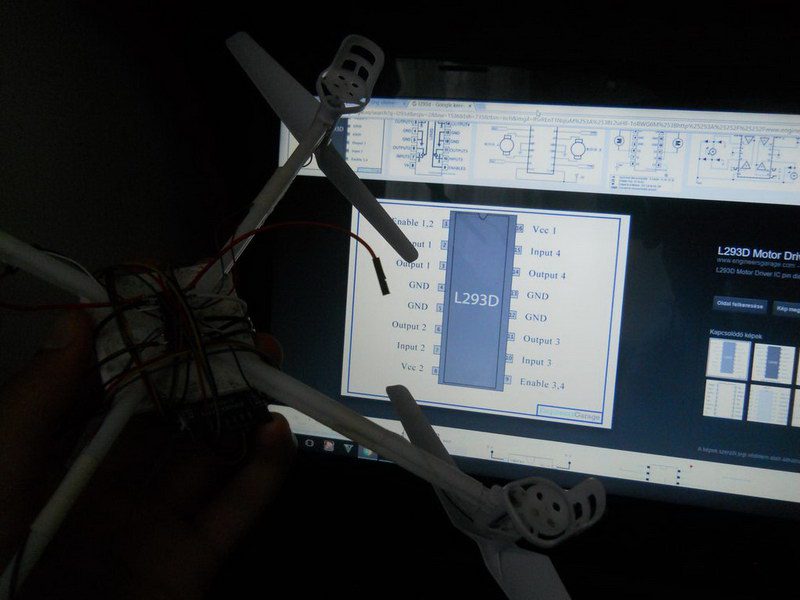
مرحله 6: لحیم کاری موتورها به درایور

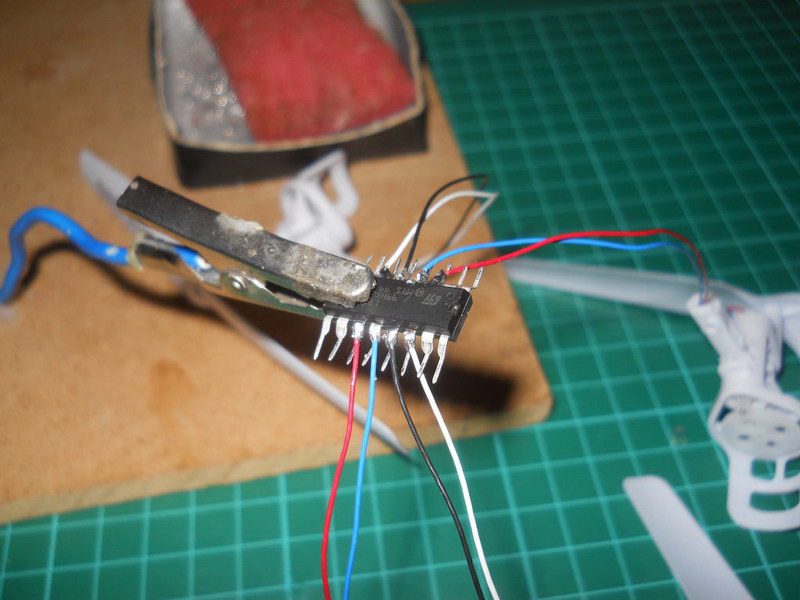

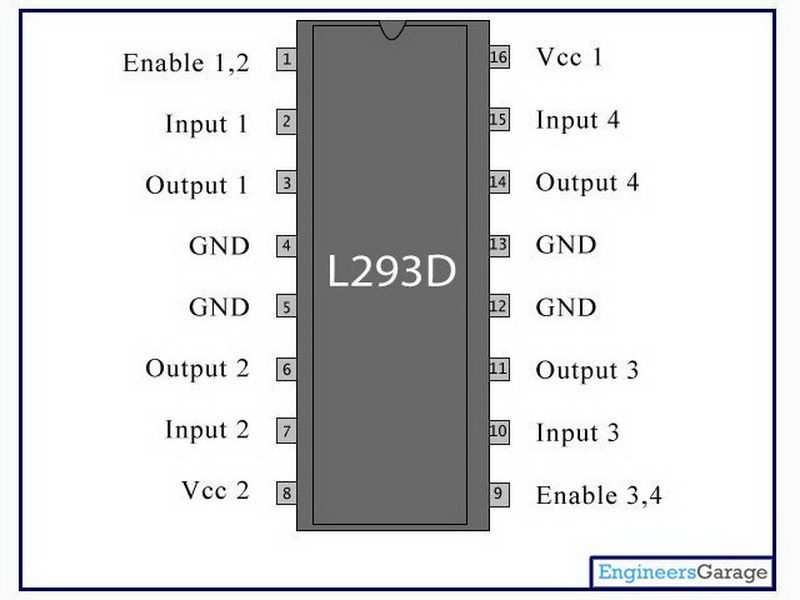
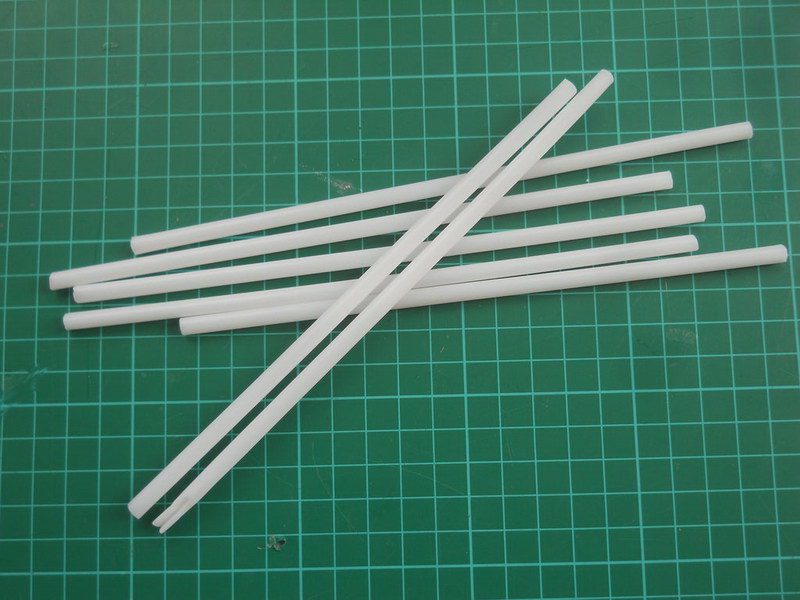
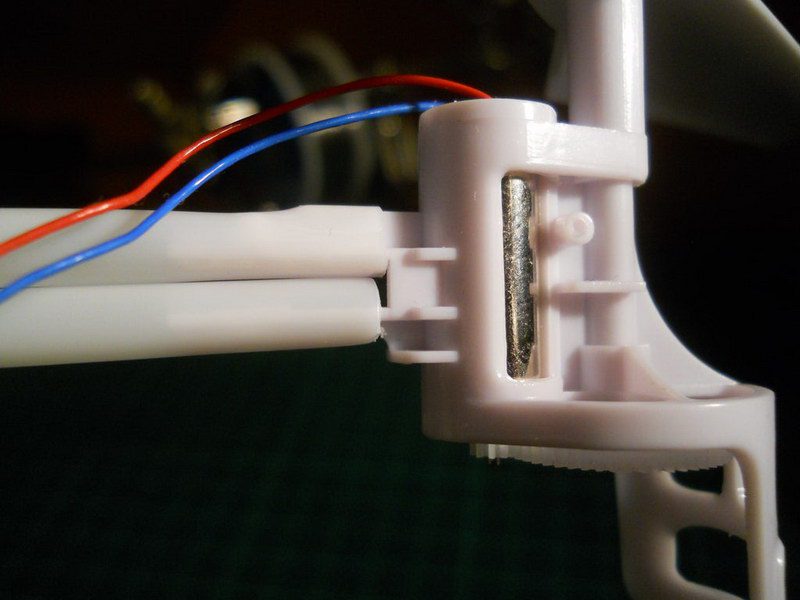
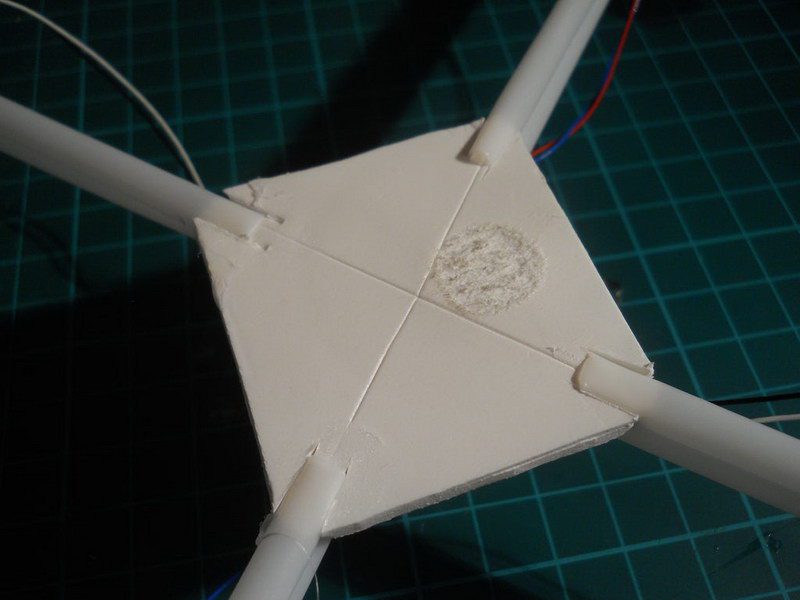
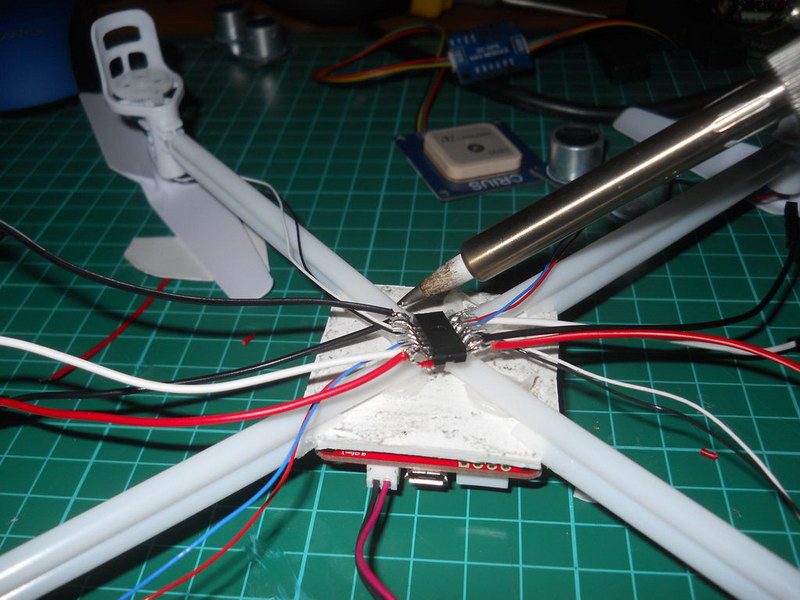
اکنون باید تمام کابل ها را از موتورها به آی سی درایور موتور L293D لحیم کنید. به عکس ها نگاه کن خیلی بیشتر میگن باید سیم های مشکی و آبی رو به GND و سیم های مثبت رو به خروجی های 1-4 وصل کنی مثل من. L293D می تواند این موتورها را به حرکت درآورد، اما توصیه می کنم از ترانزیستورهای توان استفاده کنید زیرا این تراشه نمی تواند هر چهار موتور را با قدرت بالا (بیش از 2 آمپر) اداره کند. پس از این برش، نی های 15 سانتی متری، موتورها را در جای خود نگه می دارند. سازنده از نی های قوی اضافی استفاده کرده است. این نی ها را به آرامی روی چرخ دنده های موتور قرار دهید.
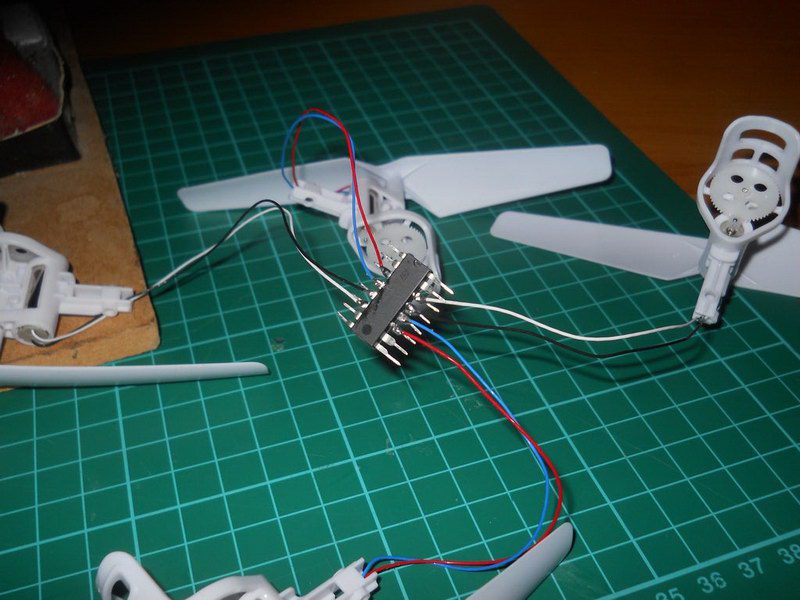
مرحله 7: مونتاژ قاب


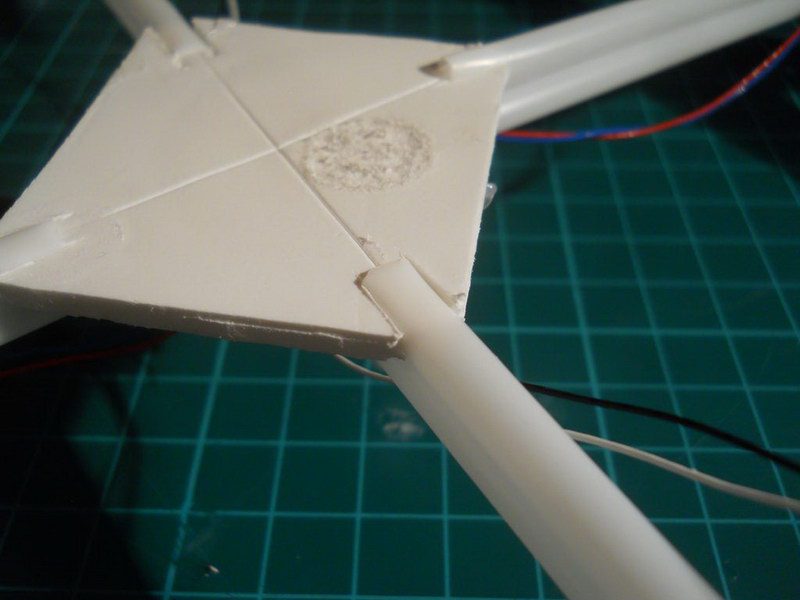
لطفا به تصویر دوم توجه کنید، که نشان می دهد پروانه ها چگونه مجهز هستند. از مقداری چسب حرارتی و چسب فوق العاده برای هر چهار پروانه استفاده کنید سپس اتصالات را بررسی کنید. بسیار مهم است که پروانه ها باید در فاصله یکسانی از یکدیگر باشند.
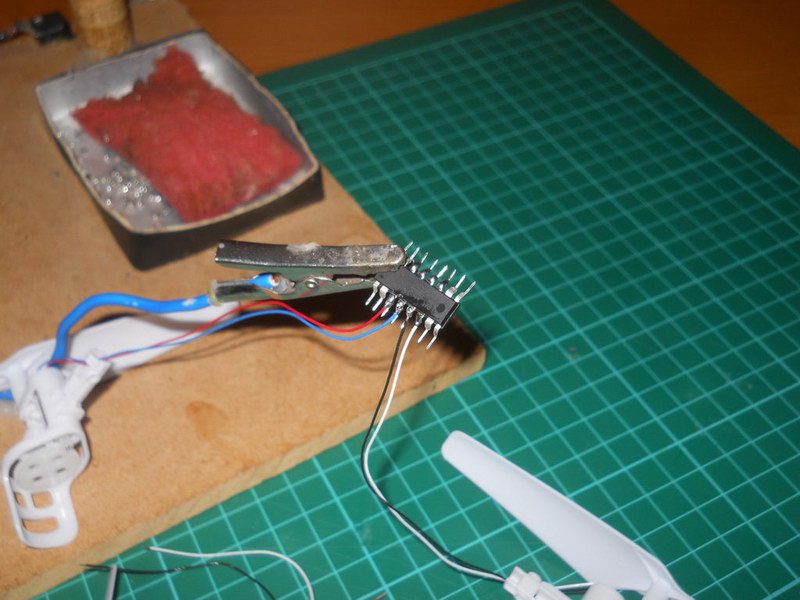
مرحله 8: سیم ها را به L293D اضافه کنید.

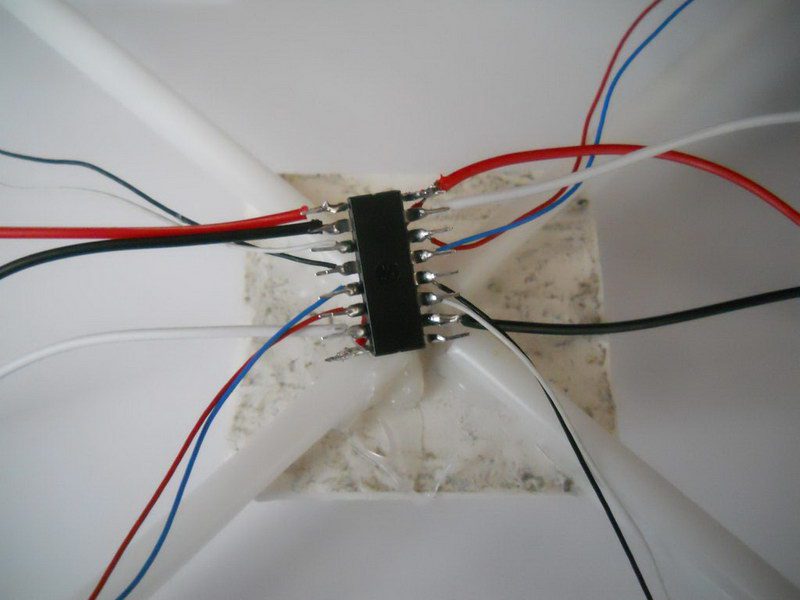

چهار سیم جامپر ماده-ماده را بردارید و آنها را از وسط ببرید. سپس آنها را به پایه های باقیمانده آی سی لحیم کنید. این به اتصال پین ها به پین های ورودی/خروجی آردوینو کمک می کند. اکنون زمان ساخت مدار است.
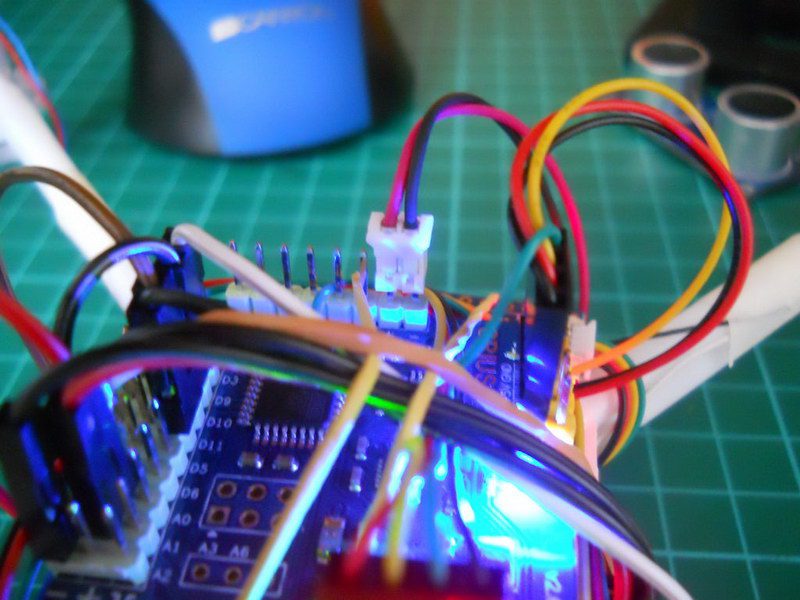
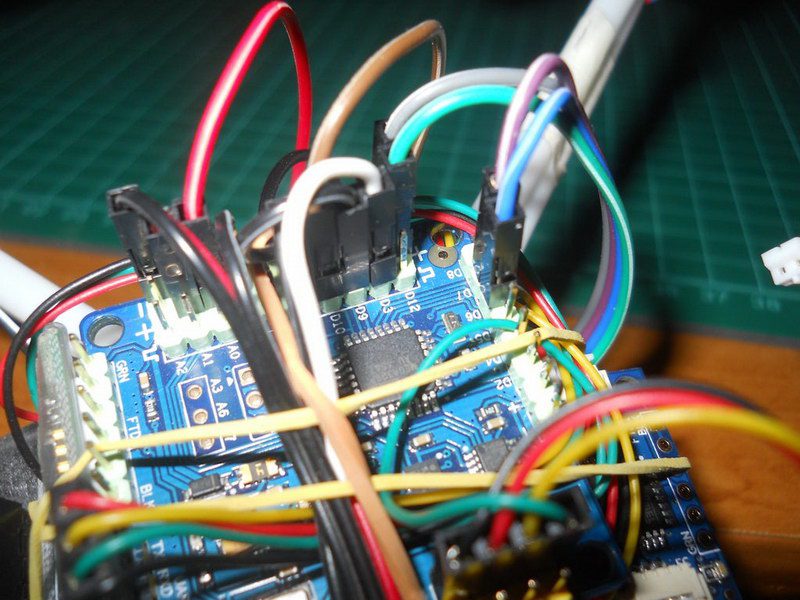
مرحله 9: مدار
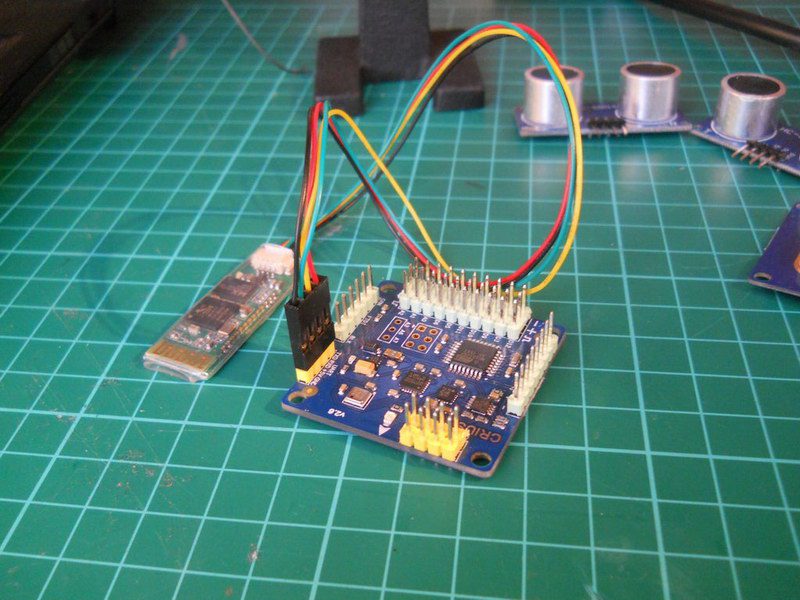
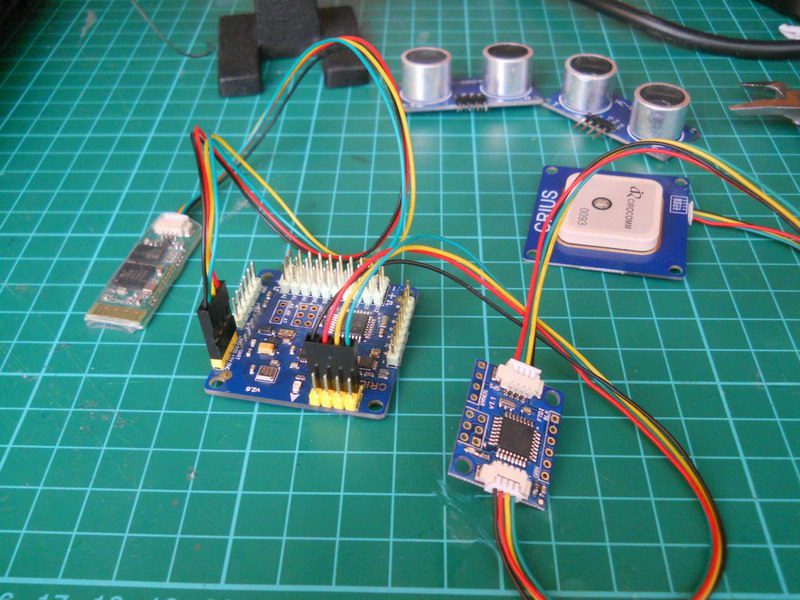
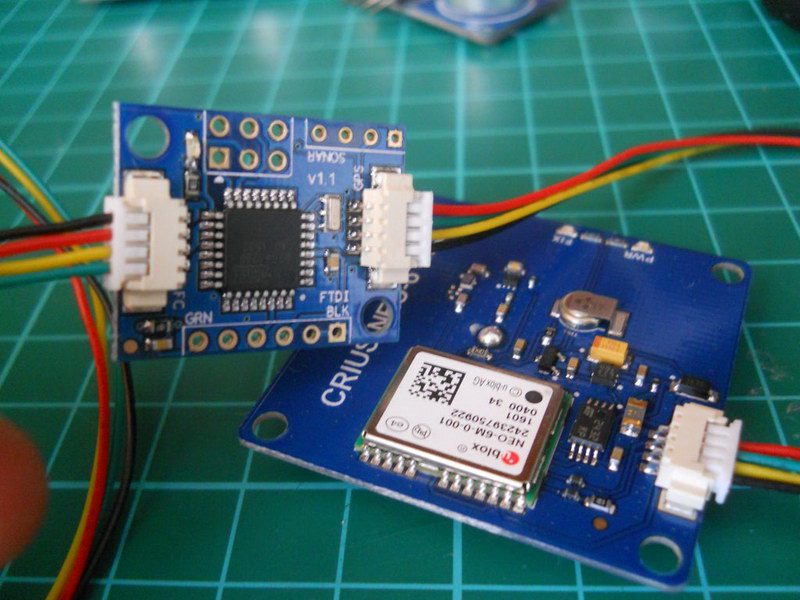
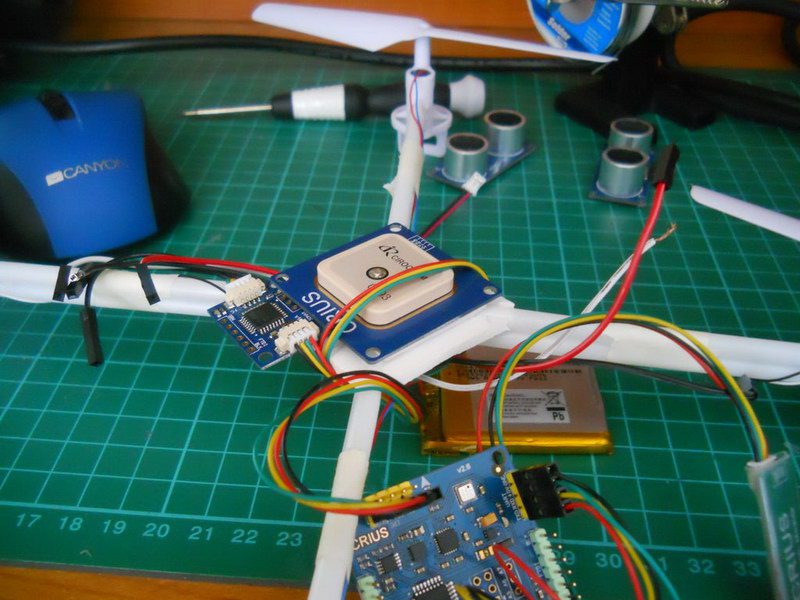
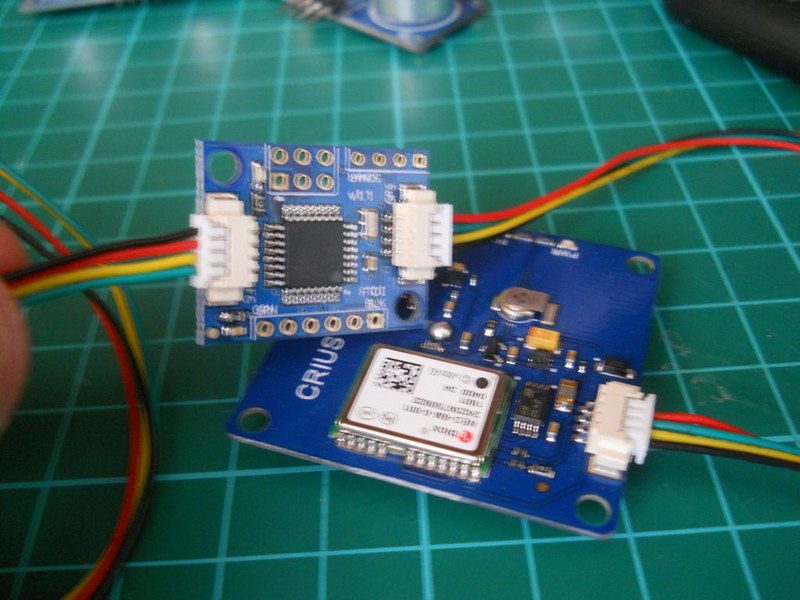
همه ماژولها همراه با کیت کنترل پروازی هستند که سازنده خریده، بنابراین فقط باید آنها را به هم وصل کند. بلوتوث به پورت سریال می رود، GPS ابتدا در مبدل I2C سپس در پورت I2C قرار می گیرد. اکنون می توانید این را در پهپاد خود تجهیز کنید.
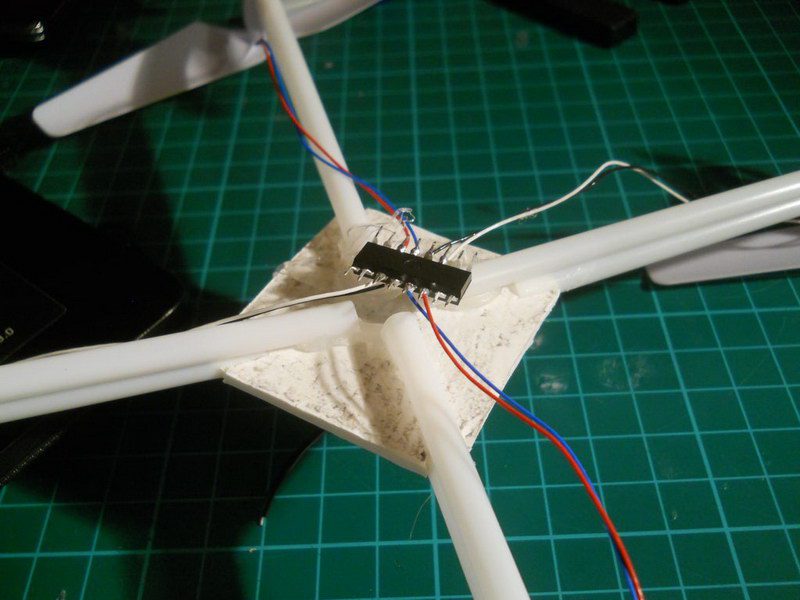
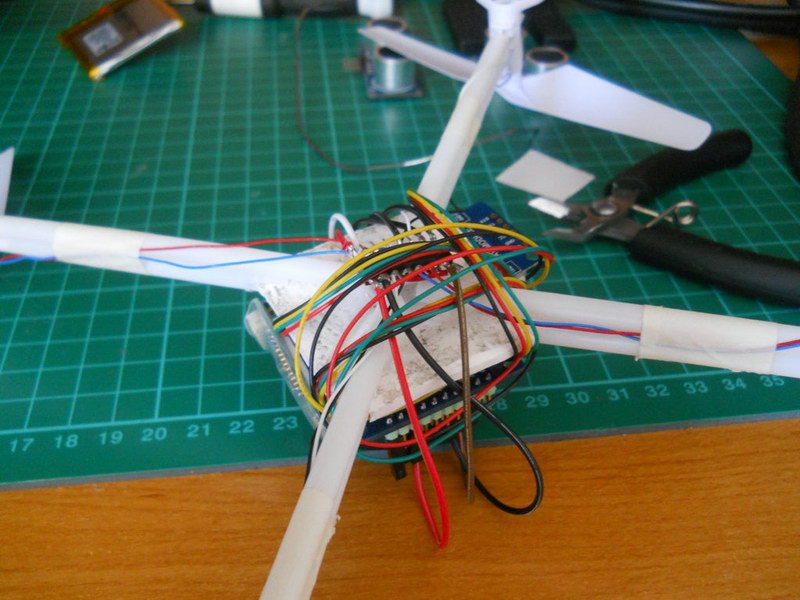
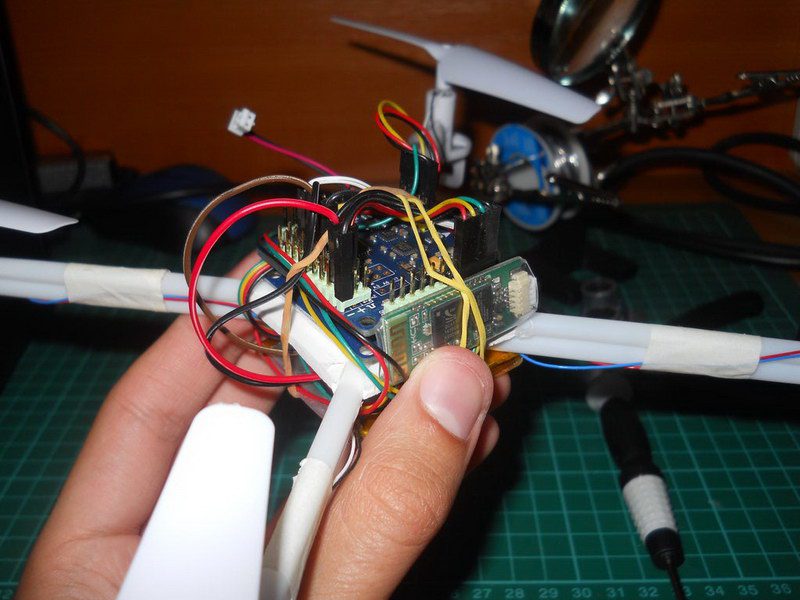
مرحله 10: قرار دادن مدار روی قاب


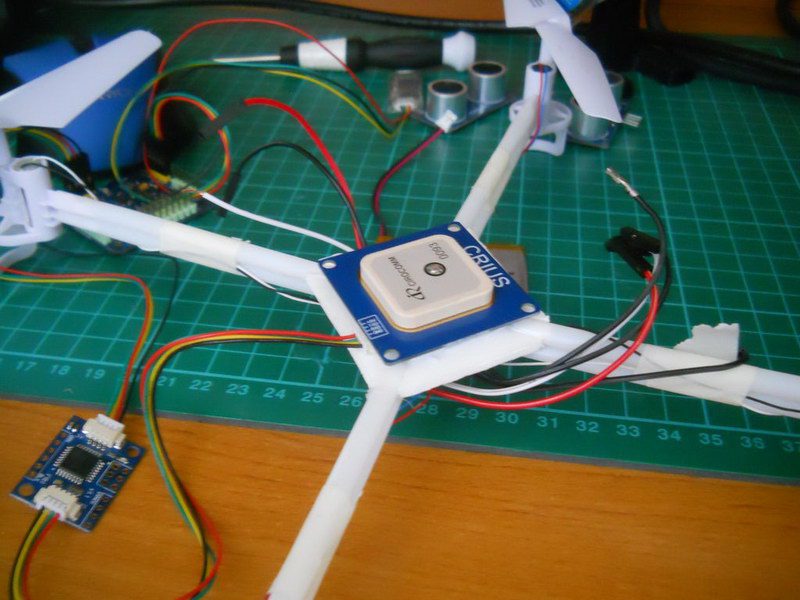
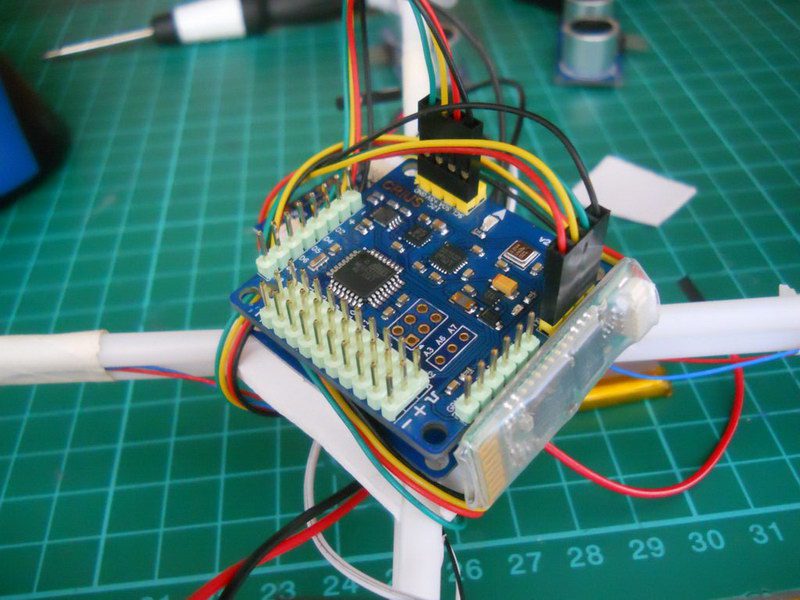
از نوار دو طرفه استفاده کنید و ابتدا GPS را اضافه کنید. این نوار اسفنجی همه چیز را در جای خود نگه می دارد، بنابراین هر ماژول را یکی یکی روی قطعه پلاستیکی بچسبانید. اگر این کار را تمام کردید، می توانید پین های درایور موتور را به MultiWii متصل کنید.
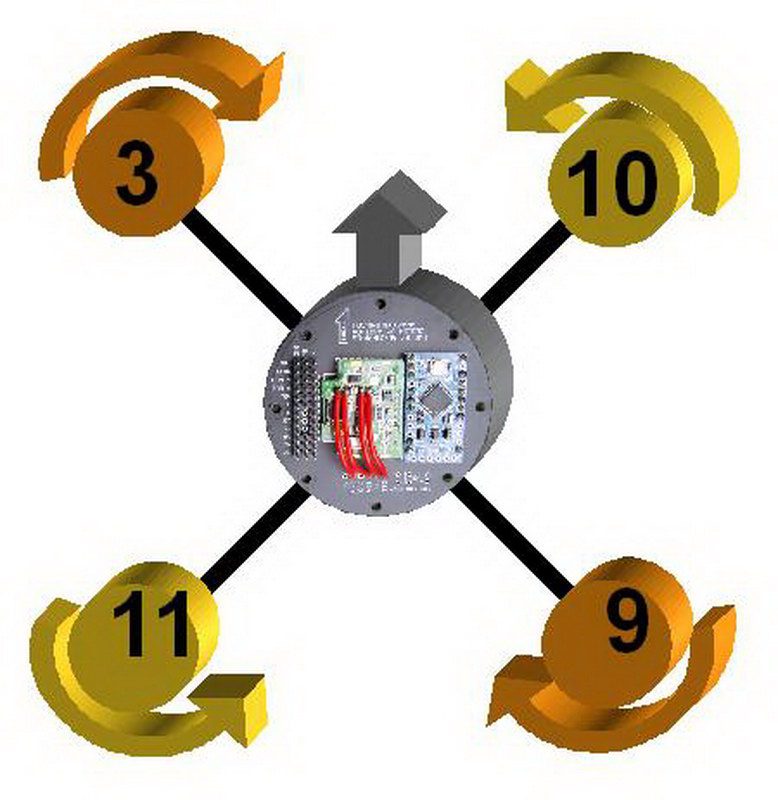
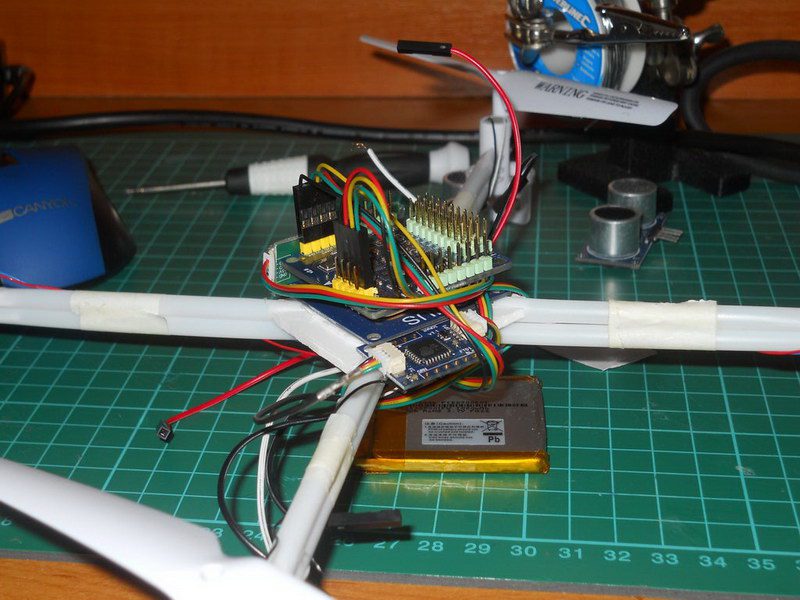
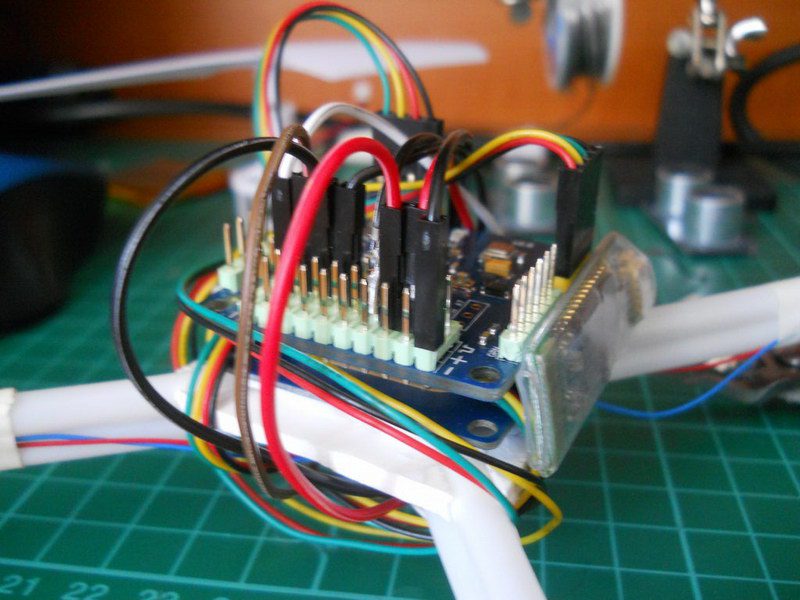
مرحله 11: اتصال دو مدار
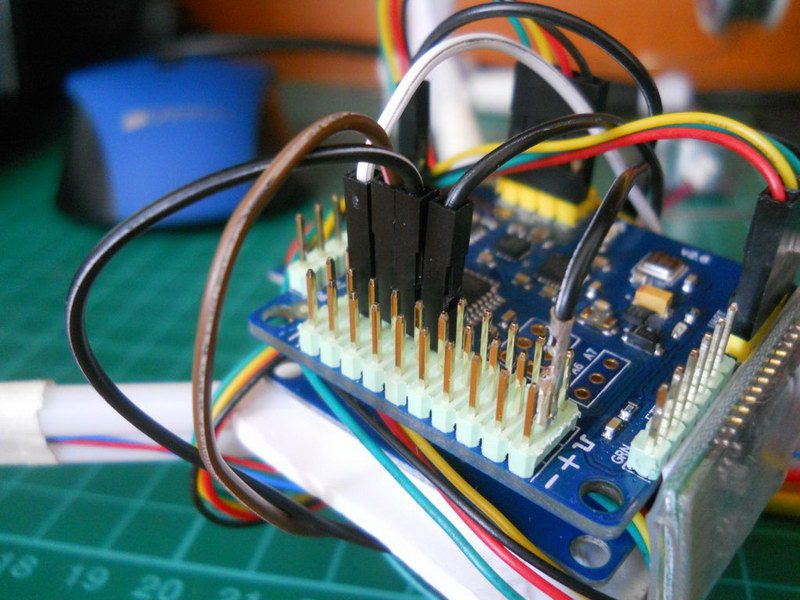
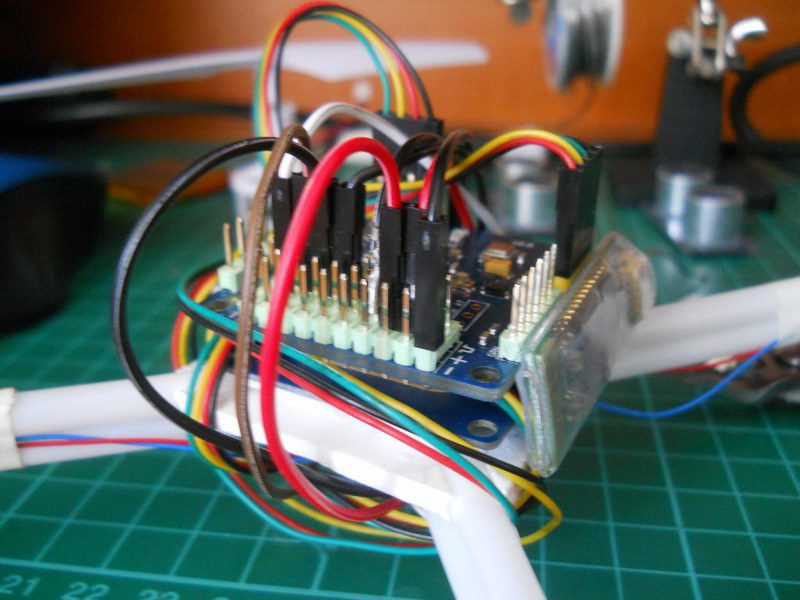
پایه های ورودی به D3، D9، D10، D11 می روند و بقیه باید به پین های VCC+ و GND- متصل شوند.
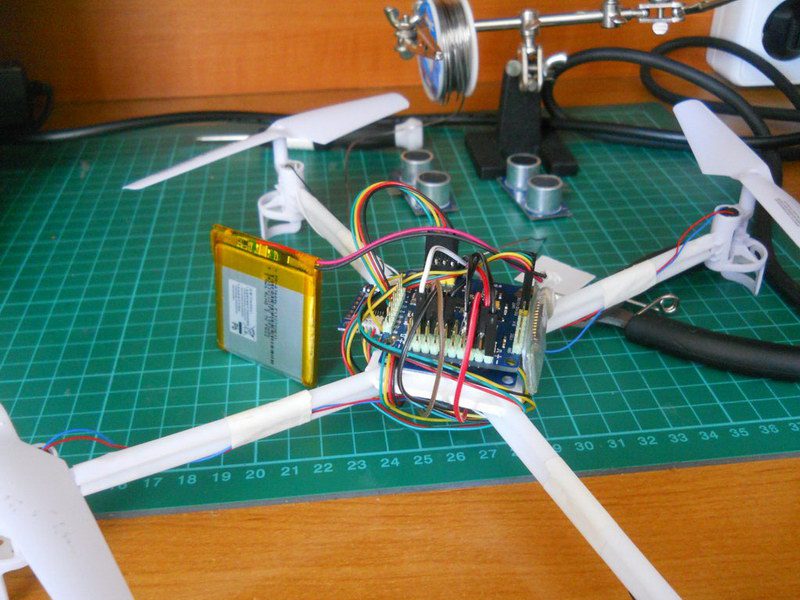
مرحله 12: باتری


سازنده از چند نوار لاستیکی استفاده کرده است تا باتری خود را در پایین هواپیمای بدون سرنشین ثابت کند و آن را به خوبی نگه دارد. آن را به برق وصل کرد و پهباد هوشمند کار کرد ، درست همانطور که تصور می شد.
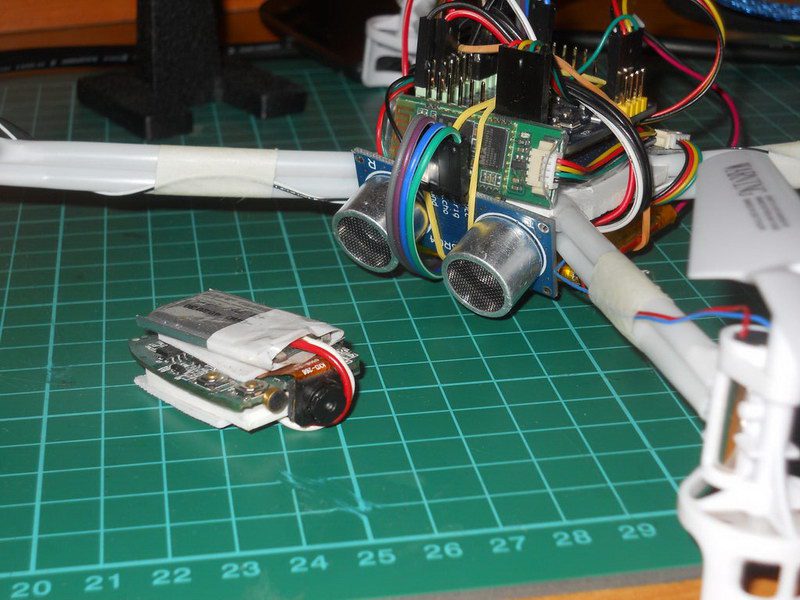
مرحله 13: سنسور اولتراسونیک

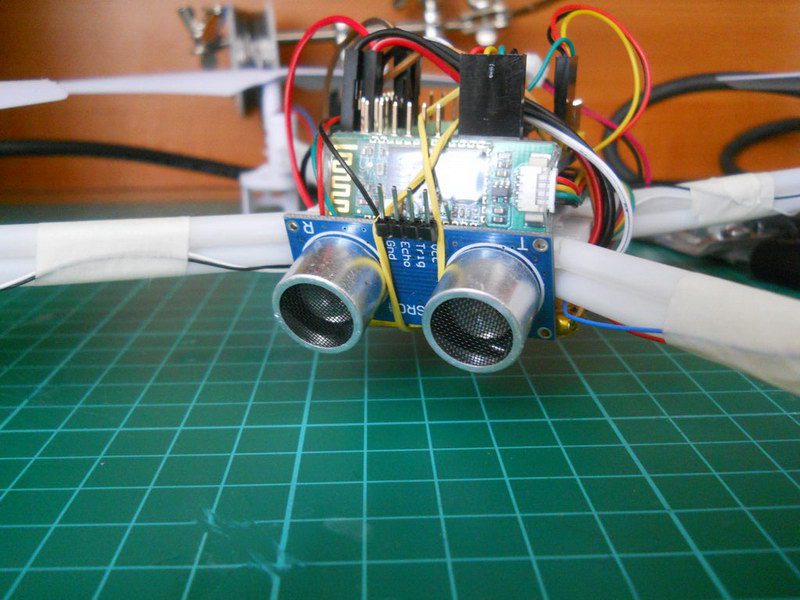
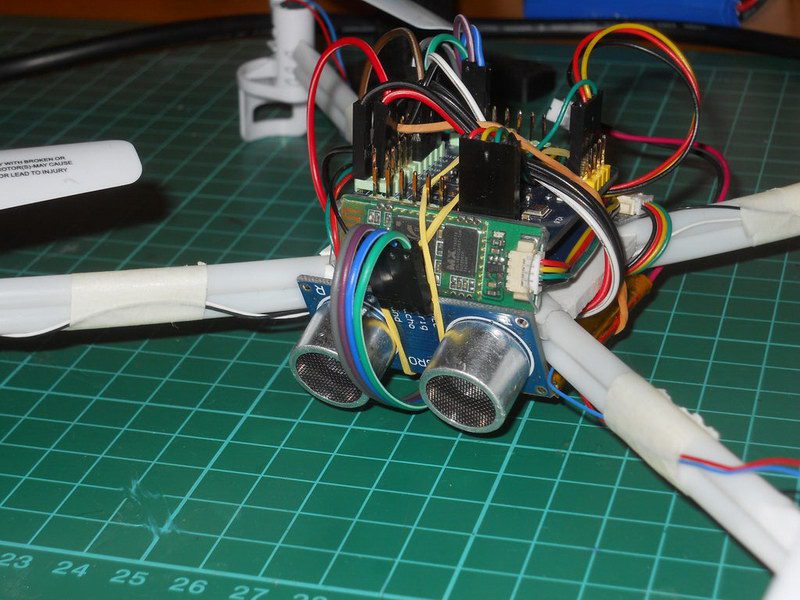
سنسور sonar با یک بند لاستیکی روی پهپاد ثابت شده و به پینهای D7 و D6 کنترلر MultiWii متصل میشود.
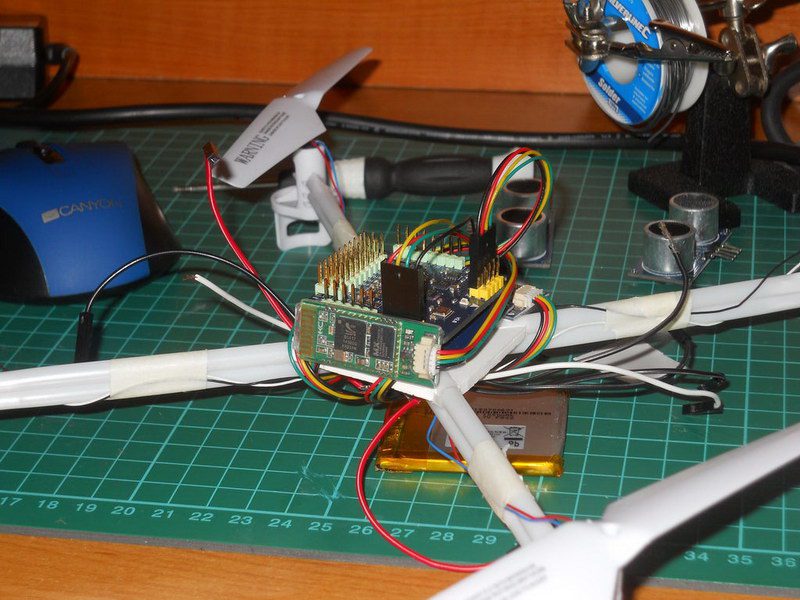
مرحله 14: چگونه آن را برنامه ریزی کنیم؟
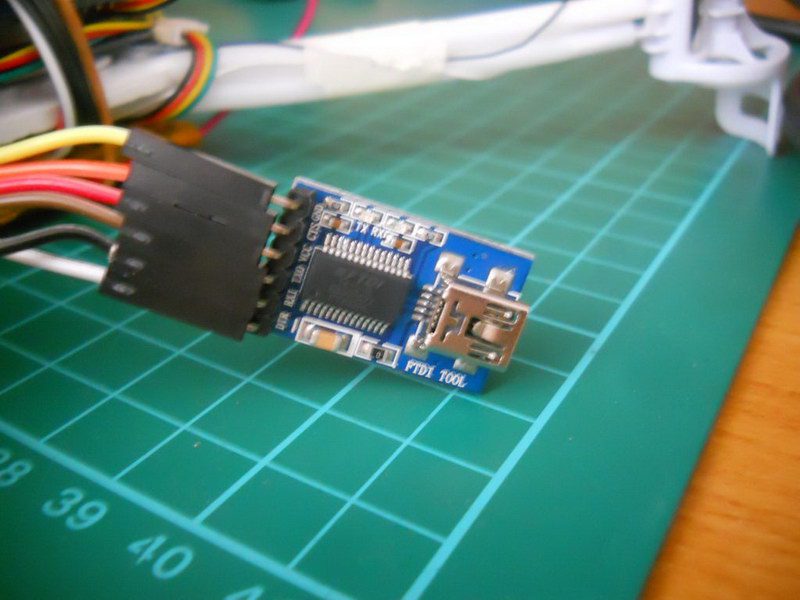
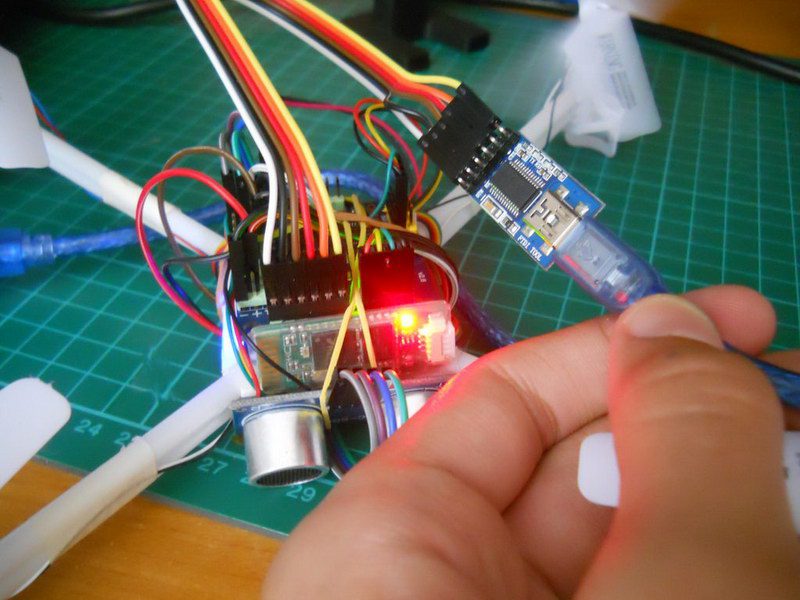
برای برنامه ریزی تراشه باید از ماژول سریال FTDI استفاده کنید. این کیت همچنین شامل ماژول برنامه نویس است.
مرحله 15: GPS چگونه کار می کند؟

سیستم موقعیت یاب جهانی (Global Positioning System) (GPS) یک سیستم جهت یابی مبتنی بر فضا است که اطلاعات مکان و زمان را در تمام شرایط آب و هوایی، در هر نقطه روی زمین یا نزدیک به آن که یک خط دید بدون مانع برای چهار یا چند ماهواره GPS وجود دارد، ارائه می دهد. این سیستم قابلیت های حیاتی را برای کاربران نظامی، غیرنظامی و تجاری در سراسر جهان فراهم می کند. دولت ایالات متحده این سیستم را ایجاد کرده، از آن نگهداری میکند و برای هر کسی که گیرنده GPS دارد، آزادانه به آن دسترسی پیدا میکند. ماژول های GPS معمولاً یک سری از رشته های استاندارد اطلاعات را تحت چیزی به نام پروتکل انجمن ملی الکترونیک دریایی (NMEA) (National Marine Electronics Association) منتشر می کنند. اطلاعات بیشتر در مورد رشته های داده استاندارد NMEA را می توان در این سایت یافت.
برای اطلاعات بیشتر در مورد برنامه نویسی این مطلب را بخوانید:
مرحله 16: نرم افزار
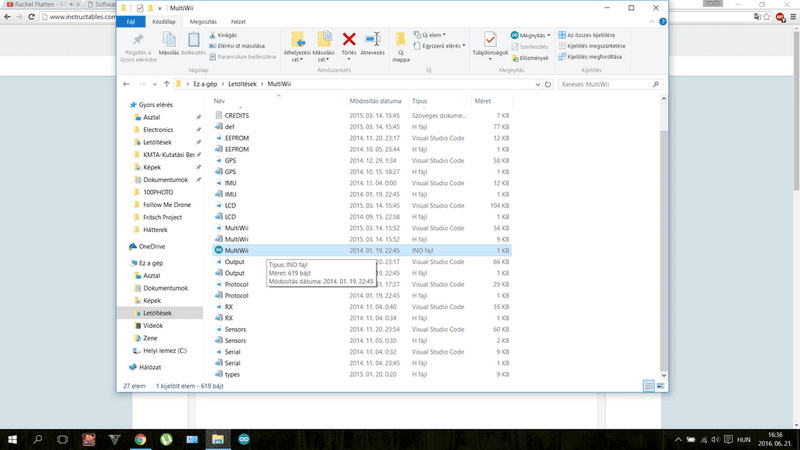
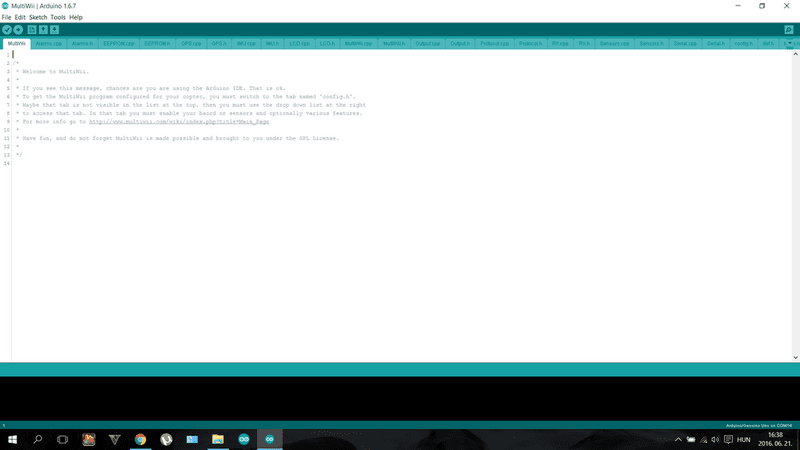
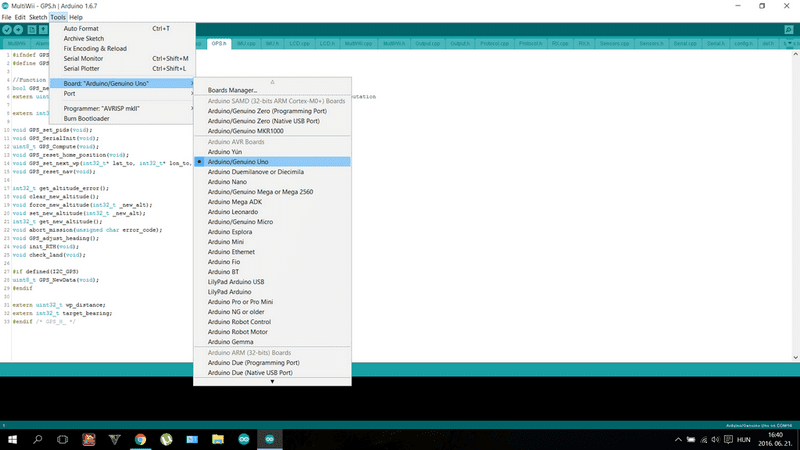
نمی دونم نرم افزار قبلا روی تراشه آپلود شده یا نه، اما در اینجا توضیح می دهم که چه کار باید کرد. ابتدا کتابخانه رسمی MultiWii را در رایانه خود دانلود کنید. فایل .zip را اکستراکس کنید سپس آن را در فایل MultiWii.ino باز کنید. “Arduino/Genuino UNO” را انتخاب کنید و آن را روی برد خود آپلود کنید. اکنون میکروکنترلر شما همه عملکردها را از قبل نصب کرده است. ژیروسکوپ، چراغ ها، بلوتوث و حتی ال سی دی کوچک (که در این پروژه استفاده نمی شود) با کد آپلود شده کار می کند. اما از این کد فقط می توان برای آزمایش اینکه آیا ماژول ها بی نقص کار می کنند یا نه استفاده کرد. سعی کنید پهپاد را کج کنید، خواهید دید که موتورها به دلیل ژیروسنسور می چرخند. ما باید کد کنترلر را تغییر دهیم تا گوشی را دنبال کند.
پس از این می توانید پهپاد هک شده خود را بسازید اگر بتوانید آردوینو را برنامه ریزی کنید یا دستورالعمل های من را دنبال کنید و آن را به عنوان پهپاد “دنبال من” کنید.
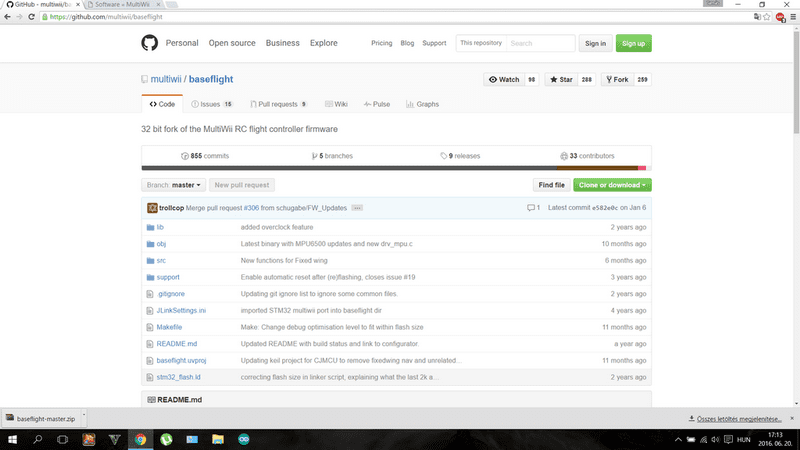
لینک GitHub برای نرم افزار: https://github.com/multiwii
لطفاً برای جزئیات بیشتر در مورد نرم افزارها به سایت رسمی مراجعه کنید: http://www.multiwii.com/
مرحله 17: اصلاح کد
سازنده مجبور شد که برای کد سنسور و کد کنترلر را که آماده برای ATMega328 بود تغییر دهد، اما اکنون ماژول بلوتوث سه مختصات GPS می دهد و بسته به اینها پهپاد حرکت می کند، بنابراین اگر مختصات x و y گوشی 46^44’31” باشد. و 65^24″13′ و مختصات پهپاد 46^14’14” و 65^24″0′ است، سپس پهپاد در یک جهت حرکت می کند تا به تلفن برسد.
پیوست ها:
دانلود MultiWiiFollowMe.rar
مرحله 18: برنامه تلفن
در اینجا از برنامه SensoDuino استفاده شده که می توان آن را از اینجا برای تلفن هوشمندتان دانلود کنید: https://play.google.com/store/apps از طریق بلوتوث به پهپاد متصل شوید و GPS TX را روشن کنید. و ثبت داده ها اکنون برنامه تلفن آماده است.
مرحله 19: دوربین
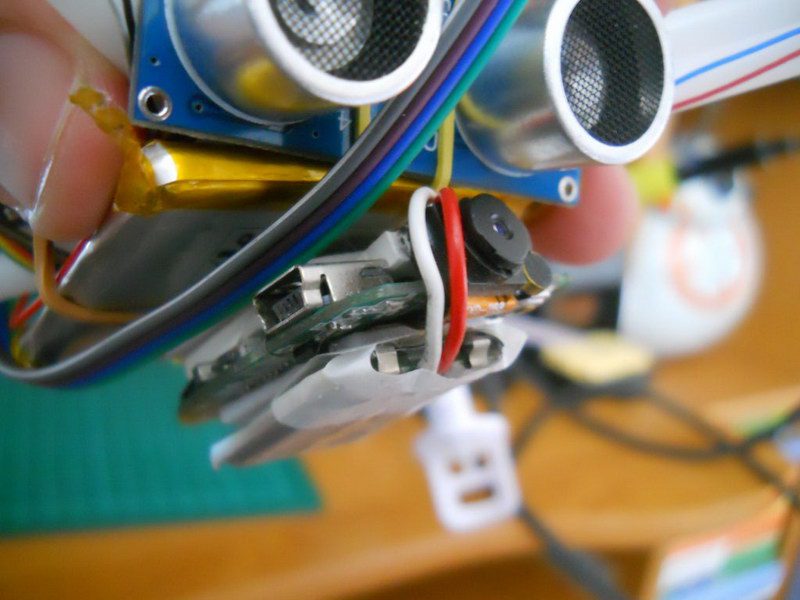

سازنده یک دوربین 720p چینی بسیار ارزان خریده که کیفیت بسیار خوبی داشت. او دوربین را روی قسمت پایینی پهپاد با نوار چسب دو طرفه قرار داده است. این دوربین در بسیاری از پروژه های او مورد استفاده قرار گرفت و همیشهبرای استفاده خوب است، وزن آن 15 گرم است و می تواند ویدیوی بسیار خوبی بسازد.
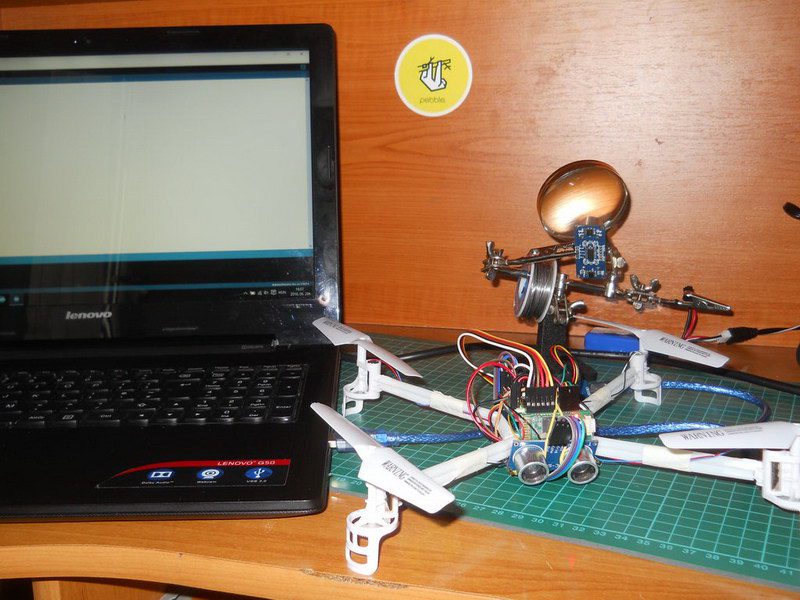
مرحله 20: تست



این پهپاد هنوز هم قابل استفاده نیست زیرا یک پروژه حرفه ای نیست، اما خوب کار می کند. سازنده با نتایج آن بسیار خوشحال است. فاصله اتصال حدود 8 متر بود که برای پهپادی مانند این کافی است. ویدیو به زودی میاد و امیدوارم خوشتون بیاد. این یک پهپاد مسابقه ای نیست، اما همچنین بسیار سریع است.
مرحله 21: برنامه های آینده
سازنده گفته است که یک پهپاد بزرگتر دارد و اگر بتواند خطاهای کد را تصحیح کند می خواهد از طریق اتصال WiFi با ماژول ESP8266 از آن پهپاد استفاده کند. روتورهای بزرگتری دارد و می تواند حتی یک GoPro را بلند کند، نه مانند نسخه اول. این پهپاد می تواند ابزار مفیدی در هنگام دوچرخه سواری، رانندگی، اسکی، شنا یا ورزش باشد، او همیشه شما را دنبال می کند.
مرحله 22: از تماشای شما متشکرم!


منبع این مطالب: